arduino
hardware
Arduino C语法
数据类型
- boolean 布尔
- char 字符类型
- byte 字节类型
- int 整数类型
- unsigned int 无符号整型
- long 长整型
- unsigned long 无符号长整型
- float 实数类型
- double
- string
- array
- void
常量
HIGH / LOW 表示数字IO的电平 INPUT / OUTPUT 表示数字IO口的方向,INPUT表示输入,OUTPUT表示输出 true/ false 表示真假
结构
void setup() 初始化发量,管脚模式,调用库函数 void loop() 连续执行函数内的语句
功能
数字IO
- pinMode(pin, mode) 输入输出IO口模式定义函数,pin表示为0~13,mode表示INPUT或者OUTPUT
- digitalWrite(pin, value) 数字IO口输出电平定义函数,pin表示0~13,value表示为HIGH或者LOW
- int digitalRead(pin) shuziio口读取输入电平函数,pin表示0~13返回值表示高电平或者低电平HIGH or LOW
模拟IO
- int analogRead(pin)_ 模拟io口读函数,pin表示0~5(根据硬件的接口来定)
- analogWrite(pin, value)_PWM 数字io口PWM输出函数,arduino数字io口标注了PWM的IO口可使用该函数,pin表示3,5,6,9,10,11,value表示0~255
时间函数
- delay(ms) 延时函数,单位ms
- delayMicroseconds(us) 延时函数,单位us
数学函数
- min(x, y) 求最小值
- max(x, y) 求最大值
- abs(x) 计算绝对值
- constrain(x, a, b) 约束函数,下限a, 上限b, x必须在ab之间才能返回
- map(value, fromLow, fromHigh, toLow, toHigh) 约束函数,value必须在范围值之间
- pow(base, exponent) 开方函数,base的exponent次方
- sq(x) 平方
- sqrt(x) 开平方
ADXL335
3自由度加速度计量传感器
ADXL335三轴加速计的使用案例
根据加速度求取倾角的原理(官方)
官方网站针对加速计的使用进行了详细说明
参考地址CSDN
使用加速计进行读取数据的案例
官方网址
对ADXL335型号加速计详细的介绍,包括硬件部分
根据加速度求取倾角的具体计算过程:
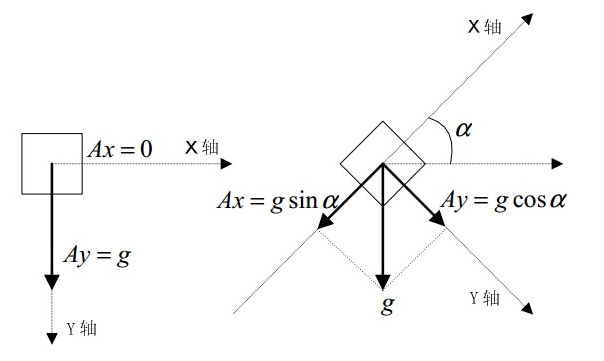
如图所示,有 \(A_x = g \sin \alpha\), \(A_y = g \cos \alpha\), then \(\frac{A_x}{A_y} = \tan \alpha\), 即 \(\alpha = \arctan( \frac{A_x}{A_y} )\)
这样,就可以根据在x、y轴上的加速度求取倾斜角度
注意:这是静止状态,运动过程需要提高采样频率
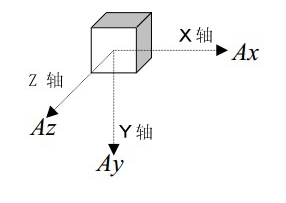
二维平面具有局限性,所以使用3维的加速度计算
与上面类似的计算过程,可以得出倾斜角度公式 \(\alpha = \arctan \frac {\sqrt{ A_x^2 + A_z^2 }}{A_y}\)
因为双\{\{问题导致语法编译错误, 暂时使用原始公式表达式
x需要说明的是,这里利用的是物体静止时受到重力的性质,如果物体同时也有加速度的话,这个公式不再准确, 需要增加一个限制条件
软件算法
如上公式所示的计算方法
反三角函数算法
- 测量xyz三轴的加速度,Ax、Ay、Az
- 计算\(A_x^2 + A_z^2 + A_y^2\),如果这个平方接近1g的平方,那么说明这组采样值是有效的,可以用来计算,否则丢弃,重复第一步
- 利用有效的采样值,通过开平方和反正切函数的科学计算,计算出倾斜角度\(alpha = \arctan(\frac{\sqrt{A_x^2+A_z^2}}{A_y})\)
- 重复第一步
查表算法
第一种算法的计算两庞大,需要高性能硬件的配合。如果避开这些计算,则可以大幅度降低算法复杂度
分两步降低算法复杂度:
- 利用整数开方代替C函数开方
- 利用查表代替正切计算,即提前计算每个角度\(\alpha\)的正切值\(\tan\),并保存在EEPROM中,那么在计算过程中,只需要计算\(\frac{\sqrt{A_x^2 + A_z^2}}{A_y}\),并在表中查找接近的正切值,那么相应的角度就是所求角度
倾斜角度的精度与角速度的分辨率之间的额关系
根据前面的计算公式,又有\(\sqrt{A_x^2+A_y^2+A_z^2} = 1g\)可以简化公式为\(\alpha = \arctan(\frac{\sqrt{(1g)^2 - A_y^2}}{A_y})\), 公式中只有一个变量Ay
倾斜角度越大,精度越低,具体参考前面的百度网址